摄影测量作为利用摄影影像进行测量的科学与技术,其理论基础离不开一系列严密的数学方程。其中,共线方程(Collinearity Equations)作为摄影测量中最基本、最重要的数学模型,构成了整个摄影测量数据处理的理论基础。 什么是共线方程? 共线方程描述了摄影时摄影中心S、像点a及其对应的地面点A三点的几何关系。这种关系是中心投影的必然结果,也是摄影测量能够从二维影像反求三维信息的数学基础。 在理想情况下,地面点A、摄影中心S和相应的像点a位于一条直线上,这种几何关系可以用严格的数学公式表达。 共线方程的数学表达 共线方程包括两个基本方程: 其中: (x, y)为像点坐标 (Xs, Ys, Zs)为摄影中心物方空间坐标 (X, Y, Z)为地面点物方空间坐标 共线方程的物理意义 内方位元素:描述了摄影中心与像平面之间的相对位置关系,是相机检校的核心内容。(x0, y0)表示主点位置,f表示相机焦距。这些参数决定了摄影光束的形状和特征。 外方位元素:描述了影像在空间中的位置和姿态。(Xs, Ys, Zs)表示摄影中心的空间位置,三个旋转角参数构成旋转矩阵,描述了影像的空间姿态。 共线方程的应用 1. 单像空间后方交会 2. 立体像对前方交会 3. 数字微分纠正 4. 相机检校 现代摄影测量中的共线方程 随着技术发展,共线方程的应用也在不断拓展: 在近景摄影测量中,共线方程成为工业测量、建筑测绘的核心算法; 在无人机摄影测量中,共线方程与POS数据结合,实现稀少控制点甚至无控制点的测绘作业; 在计算机视觉领域,共线方程的思想融入对极几何、相机标定等算法,虽形式不同但数学本质一致。 结语 共线方程作为摄影测量的理论基础,不仅在过去几十年中支撑着摄影测量学的发展,在当今的数字摄影测量时代仍然发挥着不可替代的作用。理解共线方程的原理和应用,是掌握摄影测量核心技术的关键,也是将摄影测量应用于工程实践的基础。 无论是传统的航空摄影测量,还是新兴的无人机测绘、近景摄影测量,共线方程都将继续作为连接二维影像与三维世界的数学桥梁,在数字化时代发挥更加重要的作用。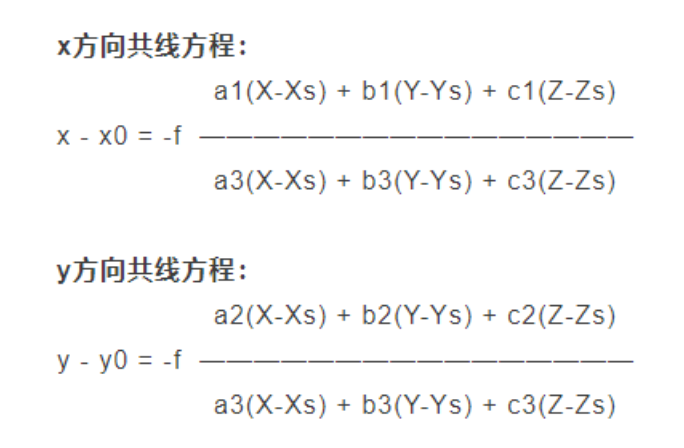
通过已知的物方控制点及其对应像点,解求该影像的外方位元素,是摄影测量定位的基础。
利用两张以上影像的外方位元素和同名像点坐标,解求对应物方点的三维坐标,是实现三维重建的核心算法。
基于共线方程实现影像的几何纠正,生成正射影像,消除地形起伏和相机倾斜引起的投影差。
通过特殊布设的控制场,解求相机的内方位元素和光学畸变参数,保证测量精度。