干测绘的朋友都知道,确定一个未知点的位置是常有的事。今天咱们就聊聊两种常用的方法 —— 前方交会和后方交会,通俗地讲讲它们是啥、啥时候用、有啥好处、要注意啥,还有怎么提高精度。
一、技术原理:两种定位逻辑的本质区别
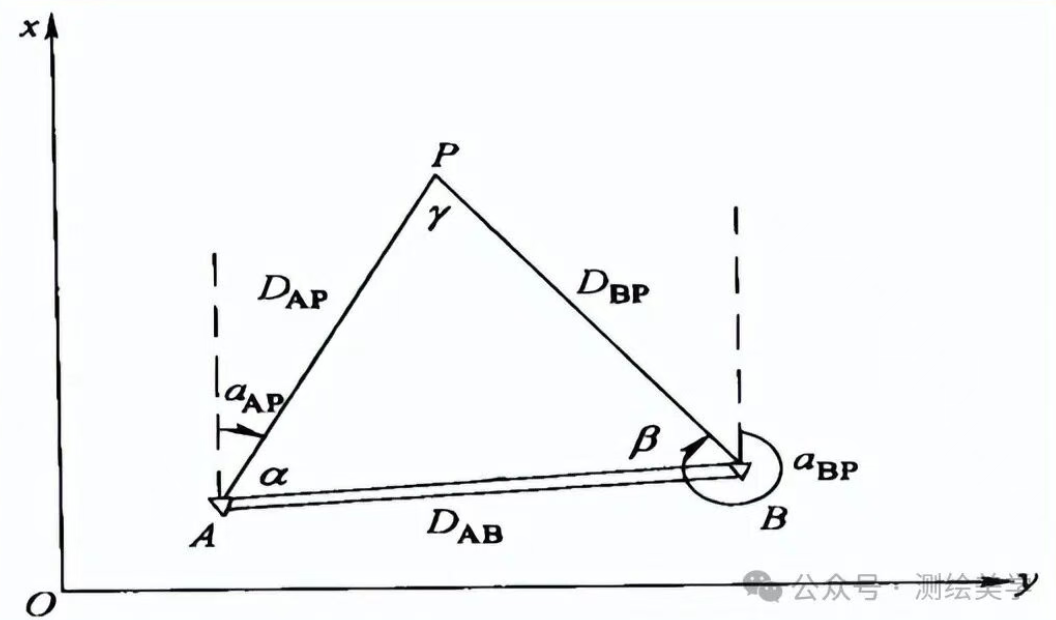
(一)前方交会:在已知点上架仪器,"瞄准" 未知点
想象你在两个山顶的观测站 A、B,手中的全站仪同时瞄准山谷中的一座铁塔 P。通过测量 A 站到 P 点与 B 点的水平角 α,B 站到 P 点与 A 点的水平角 β,利用三角公式就能算出 P 点坐标。这种 "已知点→未知点" 的双向角度交会,就像用两支手电筒的光束锁定目标,核心是在两个已知坐标点上构建角度交会图形。
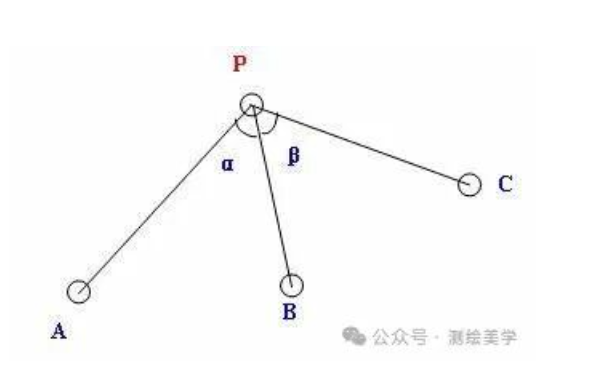
(二)后方交会:在未知点上架仪器,"看" 已知点
当你抵达一个视野开阔的未知点 P,发现能看到周围三个已知控制点 A、B、C。此时无需往返控制点,直接在 P 点架设仪器,测量到各控制点的水平角,通过坐标变换方程反推出自身坐标。这种 "未知点→已知点" 的单向角度观测,核心是在待定点构建与已知点的角度关系网。
核心区别对比
二、啥时候用哪种?看场景选方法
(一)前方交会适用场景:精度优先,未知点不好设站
当你遇到这些情况,请优先选择前方交会:
✅ 待定点距离已知控制点≤500 米(通视距离黄金区间)
✅ 目标点位于建筑顶层、山顶等难以设站的位置
✅ 工程精度要求高(如桥梁墩台定位)
典型案例:某高速公路施工中,需测定高边坡上的监测点坐标。由于监测点位于陡峭岩壁,无法架设仪器,工程师在山脚两个已知控制点设站,通过前方交会快速获取毫米级精度坐标。
(二)后方交会适用场景:效率优先,未知点好设站
这些场景下后方交会更显优势:
✅ 野外踏勘时未知点设站条件便利(如开阔平地)
✅ 已知控制点分布呈环形(3-4 个均匀分布最佳)
✅ 需快速定位(如应急测绘、地质灾害现场)
实战应用:某次地震救援中,测绘人员抵达灾区未知高点,通过观测周边 4 个控制点,10 分钟内完成自身定位,为无人机起降点规划提供关键坐标;为保证控制点的稳定性,施工现场控制点设在周边,视野不好,测绘员架设在未知点上观测。
三、各自的优势:一个准,一个快
(一)前方交会优势:精度高,误差好控制
1.误差可控性强:已知点坐标精度高(通常 ±5mm 级),且角度观测在固定测站进行,受外界干扰小
2.图形强度稳定:通过控制交会角在 30°-150°(最佳 60°-120°),可构建强几何图形,减少计算误差
3.多余观测便利:增加第 3 个已知点形成三角形交会,可通过平差计算剔除粗差
(二)后方交会优势:省事儿,适应复杂环境
1.设站成本低:减少往返已知点的时间,外业效率提升 40%+(实测数据)
2.环境适应性强:在丛林、丘陵等复杂地形中,无需频繁转移测站,尤其适合动态测量
3.设备依赖低:单站即可完成观测,对 GNSS 信号遮挡区域(如峡谷、城市高楼间)有不可替代性
四、实操注意事项:避开这些坑,少走弯路
(一)后方交会要注意:
⚠️ 通视检查:架设全站仪前,先用望远镜扫视两点间是否有遮挡(植被、建筑等),必要时绘制通视图
⚠️ 控制点复核:使用前必须检查已知点坐标,建议用第三个点进行方位角校核(偏差>5" 需重新测)
(二)后方交会要注意:
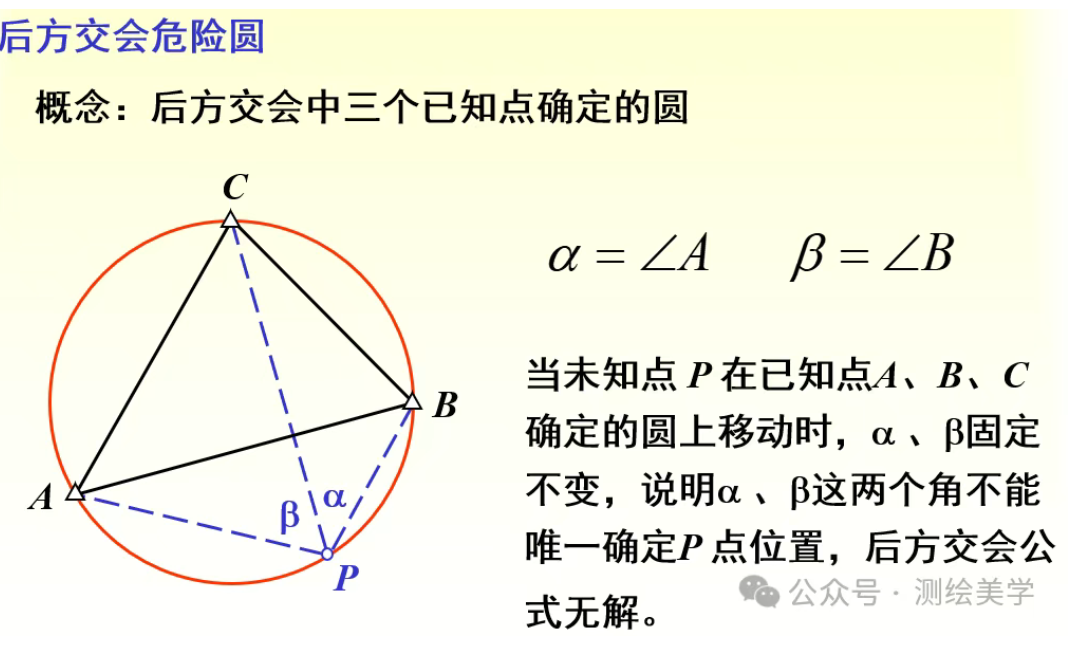
❗ 危险圆陷阱:当待定点位于三个已知点构成的圆周上时,坐标解算会出现多解或无解。
❗ 对中误差:后方交会中最少观测三个已知点,仪器对中偏差大会导致计算的坐标误差大,必须精准对中。
❗ 观测顺序:建议按顺时针或逆时针依次观测已知点,避免跳跃观测导致的瞄准误差累积。
五、怎么提高精度?记住这几招
(一)通用提精策略
1.仪器定期校准:每年送第三方机构检定,重点校准横轴误差、竖盘指标差(建议使用高精度全站仪,如徕卡 TS60,测角精度 ±0.5")
2.考虑气象因素:实时采集温度、气压数据(精度要求≤0.5℃、1hPa),启用仪器内置气象改正模型
3.数据平差处理:使用专业软件(如科傻、南方平差易)进行严密平差,自动剔除粗差并计算精度评定参数
(二)专项优化方案
六、总结:根据需求选方法,细节决定精度
前方交会和后方交会没有绝对的好坏,关键看场景:
不管用哪种方法,控制点准、仪器对中准、观测认真、数据处理到位,精度自然就高。现在新技术(比如 GNSS)虽然方便,但这两种传统方法在特定场景下还是不可替代,而且和新技术结合,还能发挥更大作用。